





Force-Feedback Pinch Controller
2025-06-25
Description
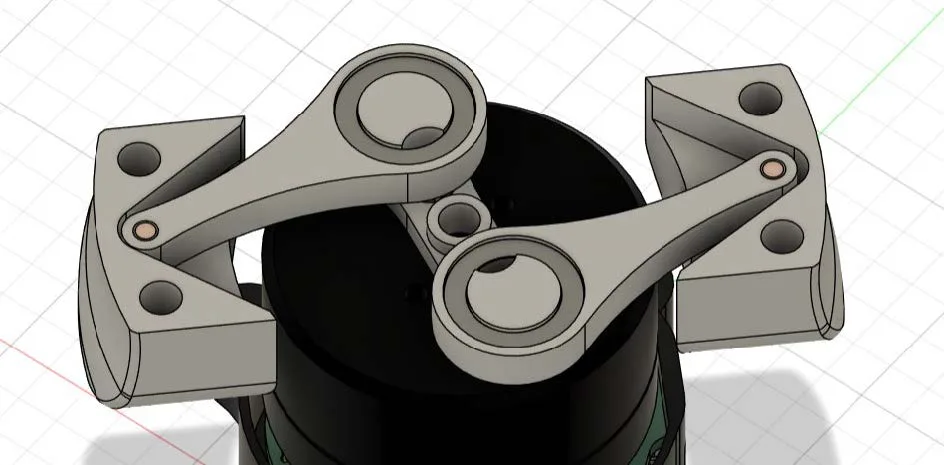
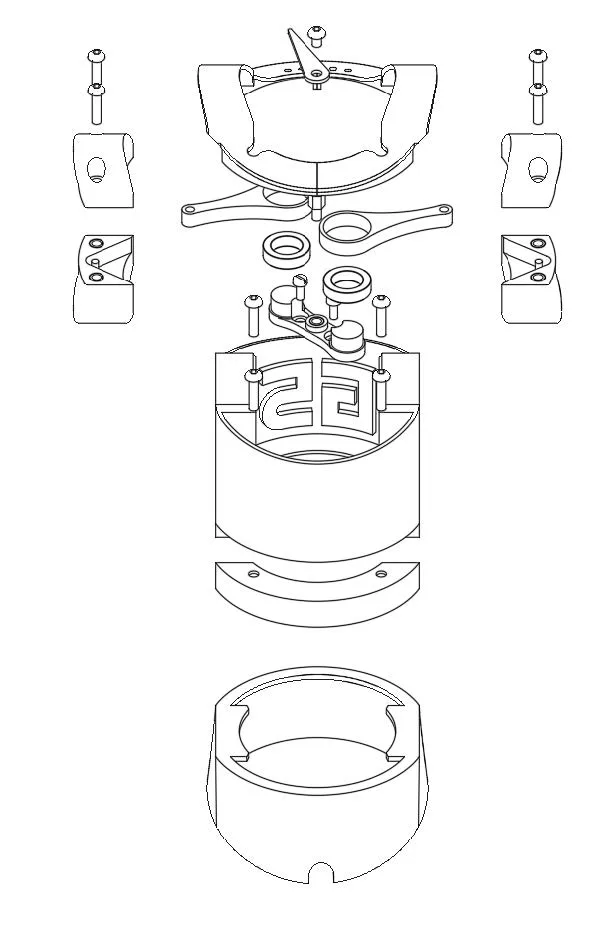
This project explores how tactile feedback can make human-machine interaction more intuitive. Our design reflects resistance from a robotic grabber directly into the user’s hand. When the grabber meets obstruction, the user feels proportional pushback through squeeze buttons. This tactile loop turns remote control into a physical experience. Using the Feelix BLDC motor kit[1], we built an interface where control and feedback are seamlessly linked. Motor strain is detected through current sensing and converted into resistance. We see potential applications in remote surgery, heavy equipment handling, and other fields requiring precise, embodied control.
[1] Feelix. [Online]. Available: kit.feelix.xyz/

Feelix kit