BRIAN V1
2024-03-05
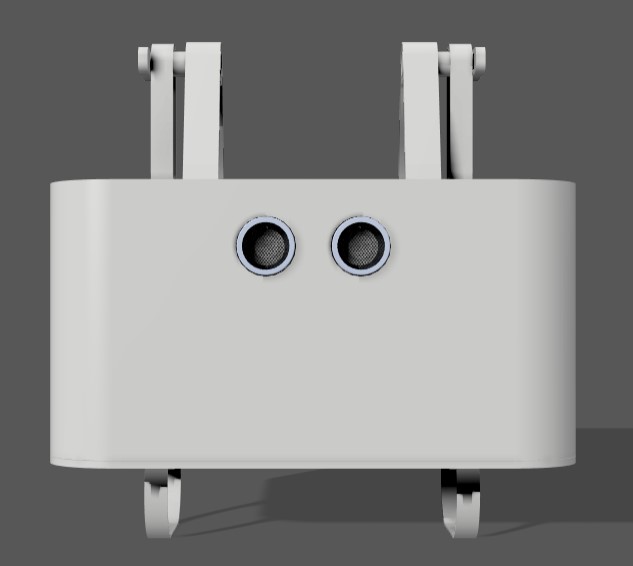
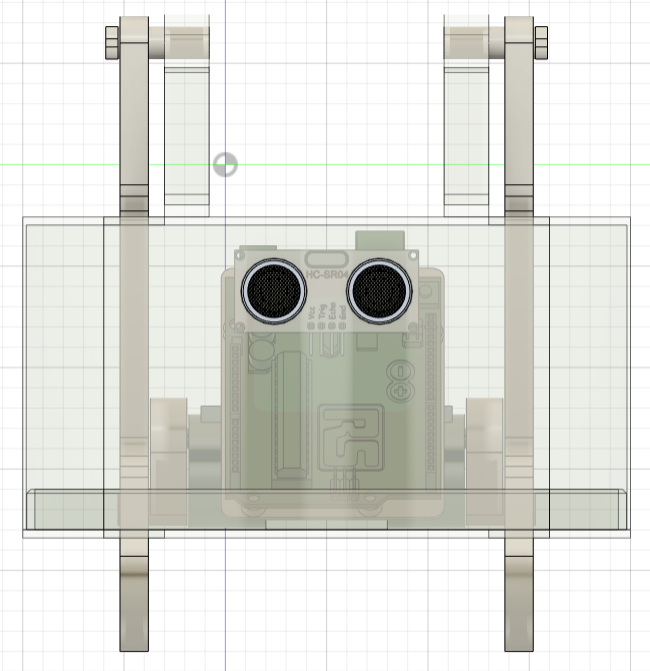
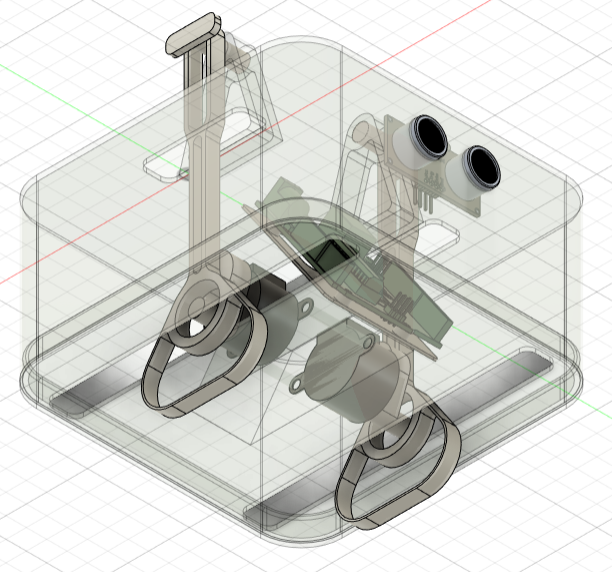
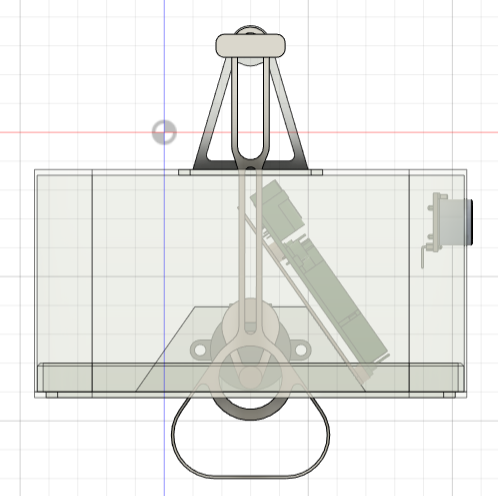
Brian is a walking robot that detects objects in front of it and walk towards it. The legs are a piston like motion system that moves up and down to propel itself forward in a wobbly way.
The issues with this model are that the wobbly mechanism makes it turn over a bit sometimes which makes the sonar sensor on the front read ground distance instead of looking forward. And the sonar sensor is limited in only looking forward, it cannot see left or right of it. It has to guess to go left or right if it wants to track.