BRIAN V1.2
2024-03-12
Description
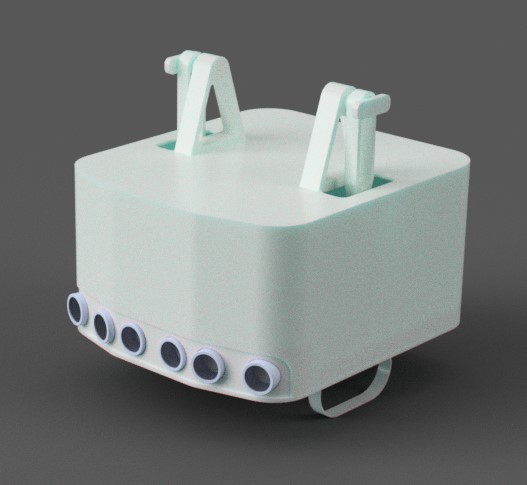
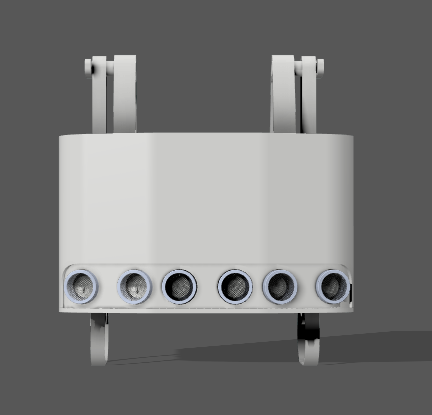
The same principle as BRIAN V1 but I made a revision on the sensors up front to be able to track.
BRIAN V1:
heddebuijs.nl/post.php?id=87<4>
It has now 3 sonar sensors: left, middle, and right. It uses the left and right sensor to detect the direction a object is relative to Brian. Left and right are both 10 degrees rotated outwards to have a bit higher field of view.